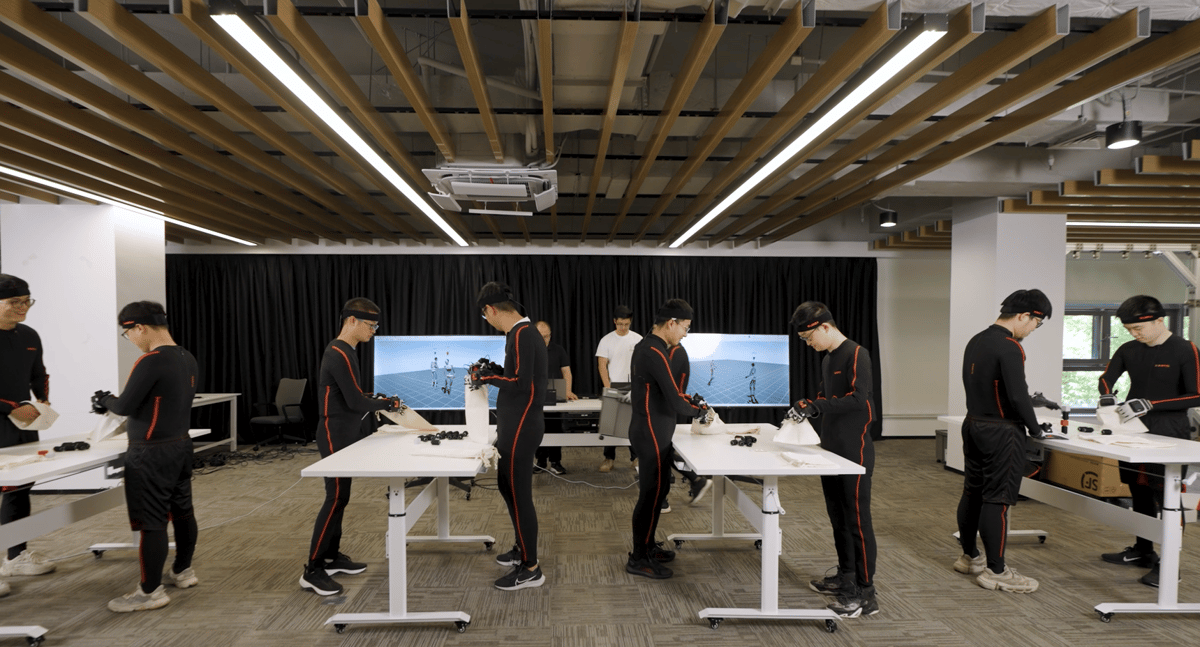
ヒューマノイドロボットの開発競争が「技術実証」から「量産・商業化」のフェーズに移行する中、ロボットに動作を教えるための現実世界の動作データの重要性が急速に高まっています。その取得手段として今、モーションキャプチャー(モーキャプ)が世界中のロボティクス開発の現場で使われています。
本コラムでは、モーションキャプチャーの基礎解説記事の派生編として、ロボティクス/フィジカルAI分野に特化して、モーションキャプチャーの役割・活用方法・世界の最新動向を解説します。
はじめに|なぜ今ロボティクスでモーションキャプチャーが注目されるのか
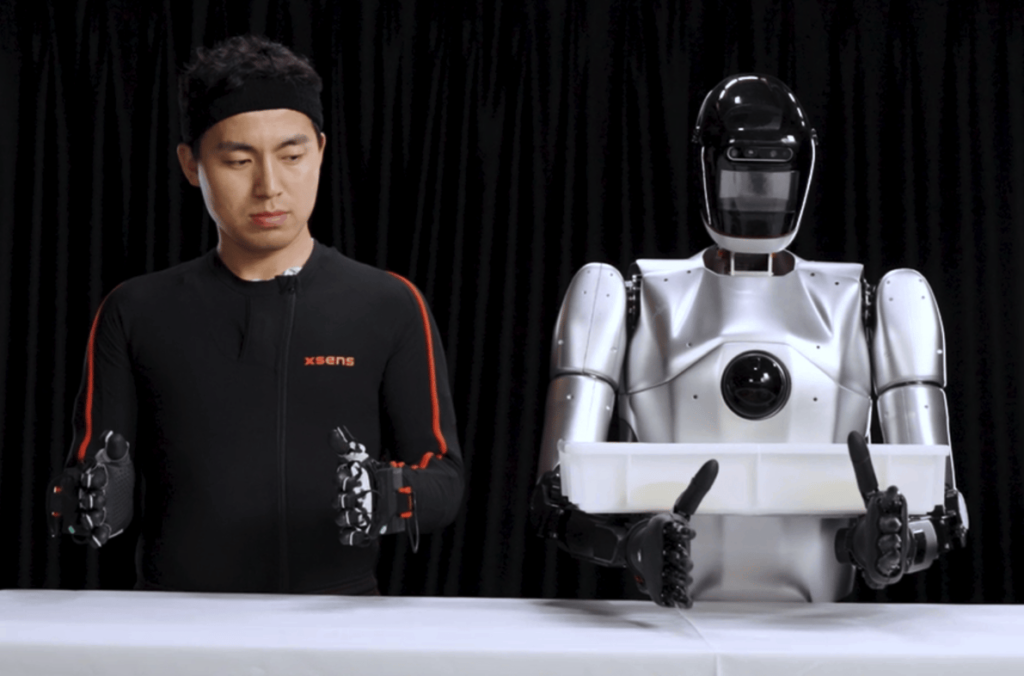
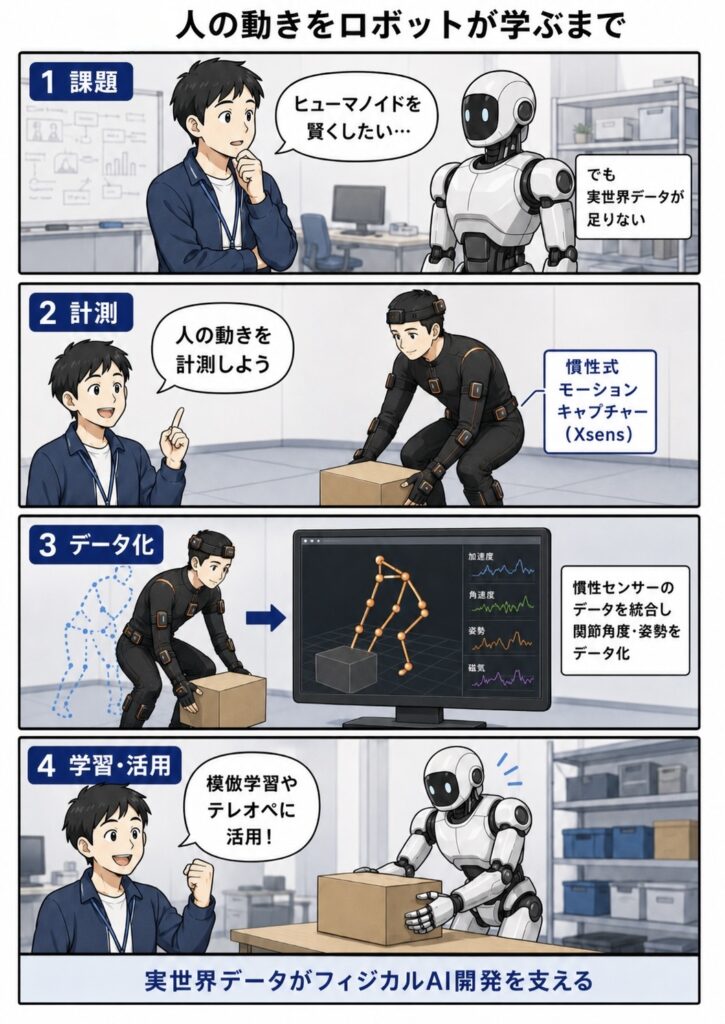
結論から言うと、フィジカルAI時代のロボティクス開発では、実世界の人間動作データがますます重要になります。モーションキャプチャーは、人間の動きを高精度に取得し、模倣学習・テレオペレーション・sim-to-realギャップの検証に活用されます。特にXsensのような慣性式モーションキャプチャーは、外部カメラに依存せず、実際の現場環境で全身の動作データを取得できるため、ヒューマノイドやロボット開発との相性が高い技術です。
2026年現在、ヒューマノイドロボットの自律動作はまだ発展途上にあり、人間がロボットを遠隔操作しながら実作業のデモンストレーションデータを集める「テレオペレーション」が、AIモデル訓練用データ収集の主要な手法となっています。実際、海外のロボティクス関連メディアでも、テレオペレーションはヒューマノイド開発におけるデータ収集手法として重要性を増していると指摘されています(出典: Labellerr「7 Top Teleoperation Service Providers for Robotics in 2026」)。
そして、人間の全身の動きを正確にデジタルデータ化し、ロボットへリアルタイムに転送する技術こそが、モーションキャプチャーです。
そもそもロボティクスとは?広がる分野とキーワード整理
産業用ロボットから汎用ロボット・ヒューマノイドへ
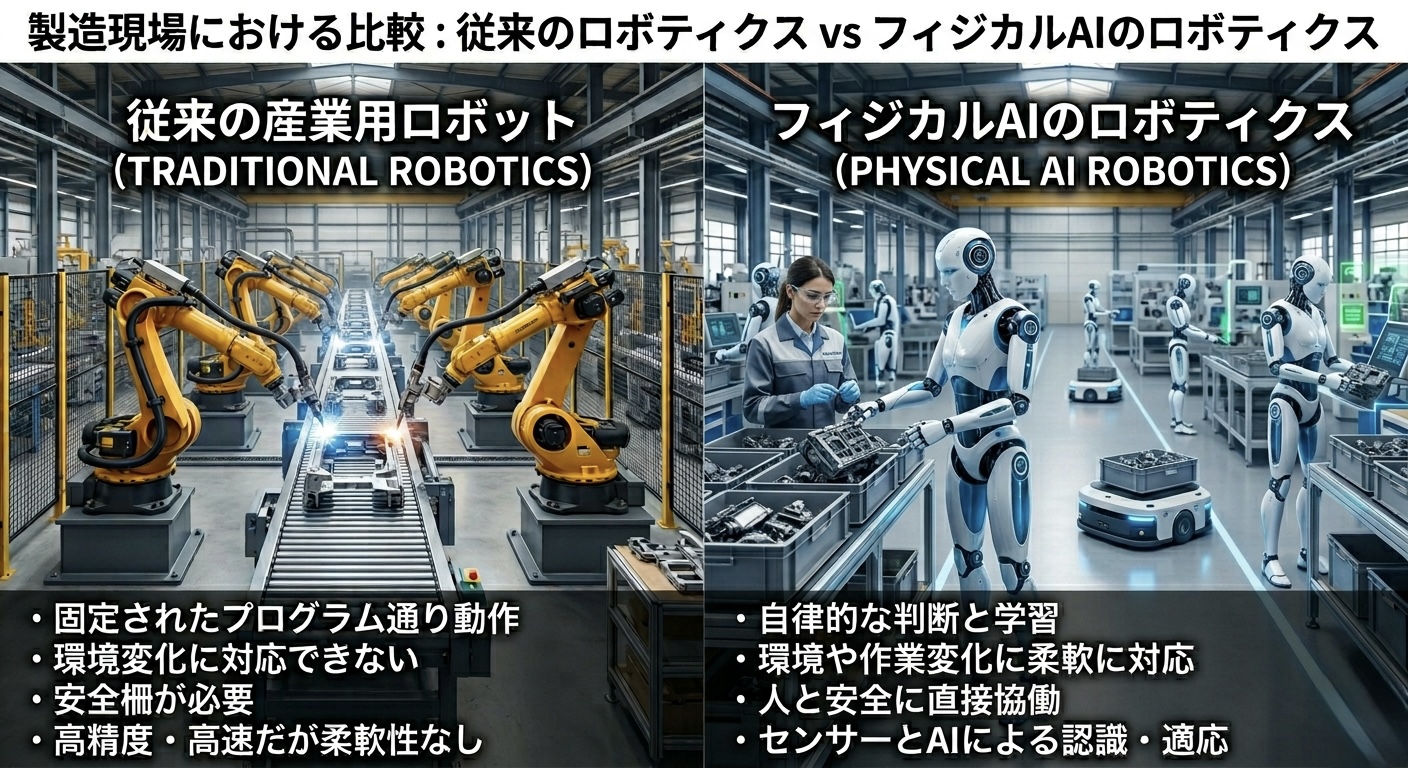
ロボティクス(robotics)とは、ロボットの設計・製造・制御・運用に関わる技術分野の総称です。従来は、工場の決められた位置で決められた作業を繰り返す「産業用ロボット」が中心でしたが、近年はAIの進化により、環境を認識して柔軟にタスクをこなす**汎用ロボット・ヒューマノイド(人型ロボット)**の開発が世界的なトレンドになっています。
フィジカルAI(Physical AI)とは何か
フィジカルAIとは、ロボットや自動運転車のように物理世界で稼働する自律マシンが、周囲の環境を知覚・理解し、複雑な動作を実行できるようにするAI技術を指します(出典: NVIDIA「フィジカル AI とは?」)。
この概念が広く注目されるきっかけのひとつが、2025年1月のCESにおけるNVIDIA CEOジェンスン・フアン氏の基調講演です。同氏はAIの進化を「知覚AI → 生成AI → エージェント型AI → フィジカルAI」という段階で示し、現実世界で知覚・推論・計画・行動するAIを次の中心的潮流と位置づけました(出典: SCSK IT Platform Navigator「フィジカル AI(Physical AI)とは?」)。
ChatGPTのような生成AIが「デジタル世界のデータ」から学習するのに対し、フィジカルAIは物理世界の法則(重力・摩擦・接触など)を伴う実世界データを必要とする点が大きな違いです。
押さえておきたい関連キーワード
- 模倣学習(Imitation Learning): 人間のお手本動作(デモンストレーション)データからロボットが動作方策を学ぶ手法。
- テレオペレーション(Teleoperation): 人間がロボットを遠隔操作すること。操作中のセンサーデータ・制御入力が記録され、模倣学習や強化学習の訓練データセットになります(出典: Labellerr)。
- sim-to-realギャップ: シミュレーション上で学習した動作が、実機・実環境ではうまく再現できない問題。
- VLAモデル(Vision-Language-Action): 視覚・言語・行動を統合的に扱うロボット向け基盤モデル。


フィジカルAIとモーションキャプチャーの関係
AIが「身体の動かし方」を学ぶ仕組み
ヒューマノイドの全身制御の研究では、人間のデモンストレーションを収集する入力手段として、VR機器・外骨格(エクソスケルトン)・モーションキャプチャースーツ・カメラ映像からの姿勢推定などが使われており、それぞれトラッキング精度・導入コスト・操作者の快適性にトレードオフがあることが整理されています(出典: TeleGate論文(arXiv, 2026))。
この中でモーションキャプチャースーツ(特に慣性式)は、全身の関節角度を高頻度・低遅延で取得でき、場所を選ばないという点で、テレオペレーションと学習データ収集の双方に適した手段として多くの研究・開発で採用されています。
シミュレーションだけでは埋まらないギャップ
近年はNVIDIA Isaac SimやMuJoCoなどの物理シミュレーターでロボットを訓練するアプローチも一般化していますが、シミュレーションと現実の間には摩擦・慣性・接触などの差異(sim-to-realギャップ)が残ります。現実の人間の動作を計測したモーションデータは、このギャップを埋め、実機適用の速度と信頼性を高めるための基盤データとなります。

データ競争の時代へ
米国のロボティクス業界分析では、ヒューマノイドAIを実用レベルに訓練できるのは「実際の作業現場で収集されたデータ」であり、実環境データを多く持つ企業が競争上有利になるという見方が示されています(出典: New Market Pitch「Figure 03 vs Tesla Optimus Comparison Tracker (2026)」)。モーションキャプチャーは、この「データ獲得競争」を支えるインフラと言えます。
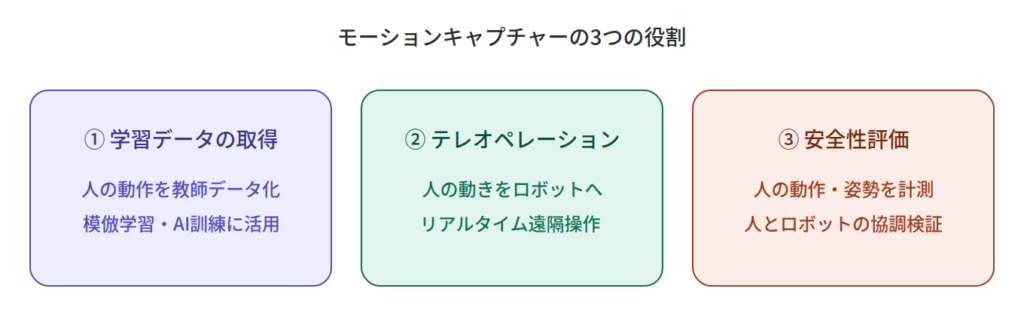
ロボティクスにおけるモーションキャプチャーの3つの役割
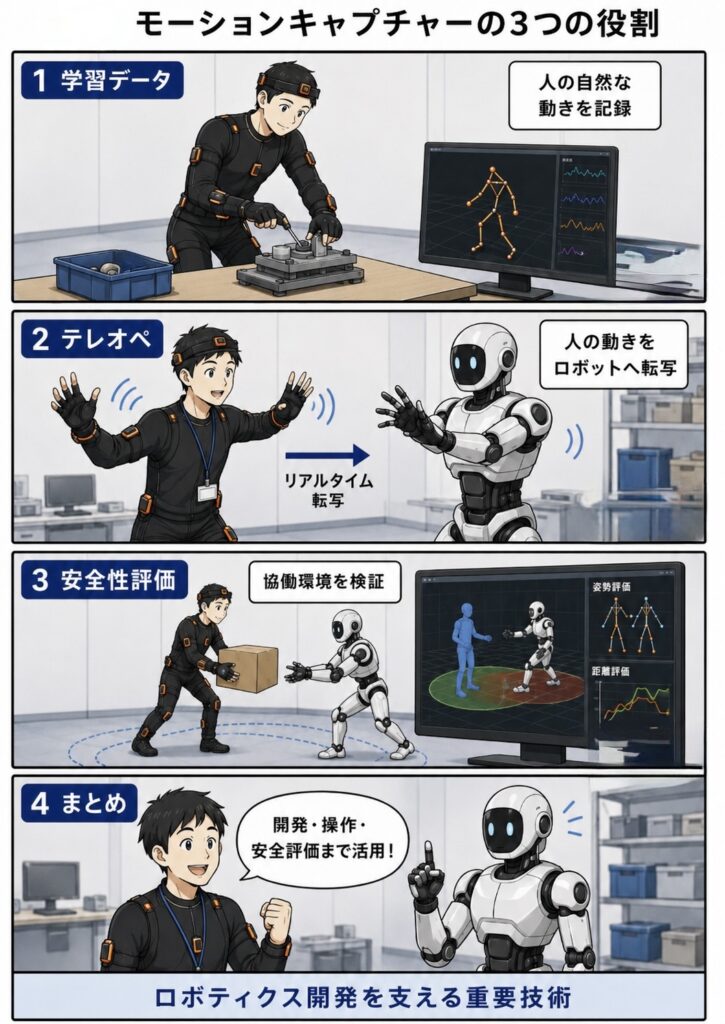
役割① 学習データの取得(模倣学習・教師データ生成)
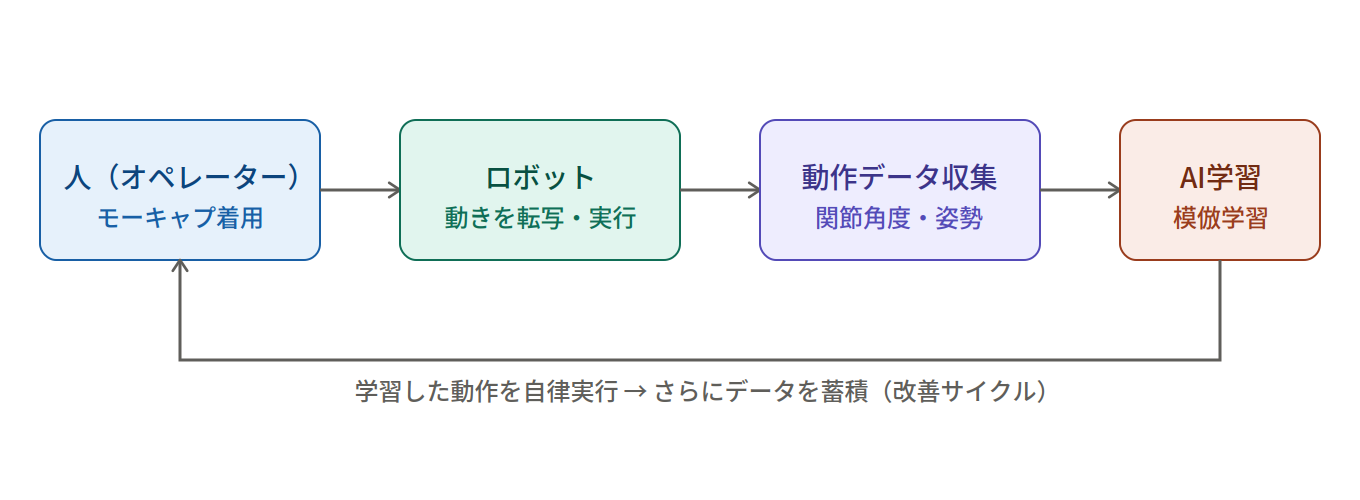
人間の自然な動作(歩行、持ち上げ、組み立て作業など)を関節角度・姿勢の時系列データとして大量に収集し、模倣学習やAI/MLパイプラインの教師データとして活用します。
役割② テレオペレーション(人の動きをロボットへ転写)
オペレーターがモーションキャプチャースーツを着用し、その動きをリアルタイムでロボットに転送(リターゲティング)して操作します。例えば、Xsensのヒューマノイド向けソフトウェア「Xsens Humanoid Live」は、約20ミリ秒の低遅延でROS 1 / ROS 2 / NVIDIA Isaac Sim / MuJoCoへモーションデータをストリーミングでき、テレオペレーション用途に対応しています(出典: Xsens「Humanoid Robotics Motion Training」)。
役割③ 安全性評価・人とロボットの協調検証
人とロボットが同じ空間で働く協働環境では、人間側の動作・姿勢を計測することで安全な協調インターフェースの設計・検証に役立てられます。イタリア技術研究所(IIT)では、Xsensを用いた人とヒューマノイドロボットの協働研究の事例が公開されています(出典: Xsens導入事例: IIT)。
ロボティクス用途における方式の選び方|3方式の比較と慣性式が有力なケース
モーションキャプチャーに唯一の正解はなく、「どの現場で・何を目的に・どんなデータが欲しいか」によって最適な方式は変わります。ここではロボティクスでよく使われる光学式・慣性式・マーカーレス式の3方式を比較したうえで、実機開発で慣性式が選択肢になりやすい理由を整理します。
ロボティクス視点での3方式比較
| 観点 | 光学式(マーカー) | 慣性式(IMU) | マーカーレス(AI) |
|---|---|---|---|
| 取得が得意なデータ | 絶対位置(ミリ単位) | 関節角度・姿勢 | 概略の姿勢 |
| 計測環境 | 専用スタジオ・カメラ必須 | 場所を選ばない(屋外・工場可) | カメラ設置のみ |
| リアルタイム性 | 高い(設備依存) | 高い(低遅延) | 中〜高 |
| 装着負担 | あり(マーカー+校正) | あり(スーツ) | なし |
| 向く用途 | 高精度研究・精密解析 | 実機テレオペ・現場データ収集 | 手軽な検証・被験者負担を避けたい計測 |
いずれかが優れているという話ではなく、精度・環境・運用性のトレードオフで選ぶのが基本です。各方式の仕組み・精度・費用のより詳しい比較は、基礎解説記事「モーションキャプチャーとは?方式の違い・費用・選び方を徹底比較【2026】」もあわせてご覧ください。研究コミュニティでも、VR・外骨格・モーキャプスーツ・映像姿勢推定は、それぞれ精度/コスト/快適性のトレードオフを持つ補完的な手段として整理されています(出典: TeleGate論文)。
ロボット用途では「絶対位置」より「関節角度」が効くことが多い
ロボットへの動作転写(リターゲティング)では、空間内の絶対位置精度よりも、各関節がどの角度で・どう動いたかという運動学(キネマティクス)情報が重要になる場面が多くあります。この点で、IMUを身体各部に装着して姿勢を算出する慣性式は関節角度データの取得に適した方式とされます。一方、ミリ単位の絶対座標が必要なバイオメカニクス研究などでは、光学式が依然として強みを持ちます。
実環境での取得しやすさ
光学式は専用スタジオやカメラ設置を前提とするため、計測場所が制約されます。これに対し慣性式はカメラ不要で、ロボットの実機がある開発ラボ・工場・屋外フィールドなど、運用環境でそのままデータを取得しやすいのが特徴です。被験者の装着負担をなくしたい場合や、準備を簡略化したい場合は、マーカーレス式が有力になります。
開発パイプラインへの組み込みやすさ
ロボティクスでは、取得したモーションをROSや物理シミュレーター(Isaac Sim / MuJoCo)、機械学習スタックへ流し込めるかが実用上の分かれ目になります。連携性やデータ形式は製品ごとに異なるため、方式選定と合わせて確認するのが現実的です。慣性式の代表例であるXsensは、ROS 1 / ROS 2・Unity・Unreal・Isaac Sim・MuJoCoとの連携や、MVNX / XLSX / MP4 / BVH形式でのエクスポートに対応しています(出典: Xsens)。フルボディスーツ「Xsens Link」は最大240Hz、約150mの通信範囲、8時間連続稼働といった仕様を備えます(出典: Xsens)。
まとめ:実機テレオペ・現場データ収集では慣性式が現実的になりやすい
整理すると、高精度な絶対位置が必要なら光学式、被験者負担を避けたい簡易計測ならマーカーレス式、実機を伴うテレオペレーションや実環境でのデータ収集なら慣性式、という使い分けになります。ロボティクスの実機開発では「関節角度・リアルタイム性・場所を選ばない運用性」が重視される場面が多いため、結果として慣性式が現実的な選択肢になりやすい、というのが各社の導入事例から見える傾向です。導入実績としては、中国のTi5 Roboticsでの開発イテレーション高速化・モーション精度向上の事例(出典: Ti5 Robotics事例)や、Boston Dynamicsのトレーニングパイプラインでの活用、北京ヒューマノイドハーフマラソン優勝チームでの活用(出典: 北京ハーフマラソン事例 / Xsens)などが公開されています。
用途に合った方式選定から、お気軽にご相談ください
用途・予算に応じた最適なシステム選定から、デモ機のお試しまでサポートいたします。
世界のロボティクス開発と各国動向【中国・米国・欧州・日本】
グローバル概況|「技術実証」から「量産・商業化」へ
英調査会社Omdiaのレポート「General-Purpose Embodied Intelligent Robot 2026」(2026年1月発表)によると、2025年の世界のヒューマノイドロボット出荷台数は約13,000台に達し、前年から大きく拡大して本格的な成長フェーズに入りました。同レポートは2035年には年間260万台規模に達すると予測しています(出典: Bloomberg / 新華社 / AGIBOTプレスリリース(PR Newswire))。
メーカー別では、中国のAgiBot(智元機器人)とUnitree(宇樹科技)が、それぞれ数千台規模を出荷して世界トップ2を占め、中国勢が出荷台数の大半を占めました。一方、Tesla・Figure AI・Agility Roboticsなど米国勢の出荷は各社数百台以下の規模にとどまったと報じられています(出典: South China Morning Post / 新華社)。
【注記】 企業別の正確な順位・台数は集計基準によって異なります。Omdia集計ではAgiBotが1位ですが、AgiBotの台数には車輪型ロボット等が含まれるとの指摘があり(出典: The Robot Report)、Unitreeは二足歩行ヒューマノイドのみで5,500台超を出荷したと報じられています(出典: South China Morning Post)。
詳細な数値は各出典をご参照ください (Omdia集計と各社発表・報道ベースの数字では、対象とするロボットの種類や集計範囲が異なるため、単純比較は避ける必要があります)。
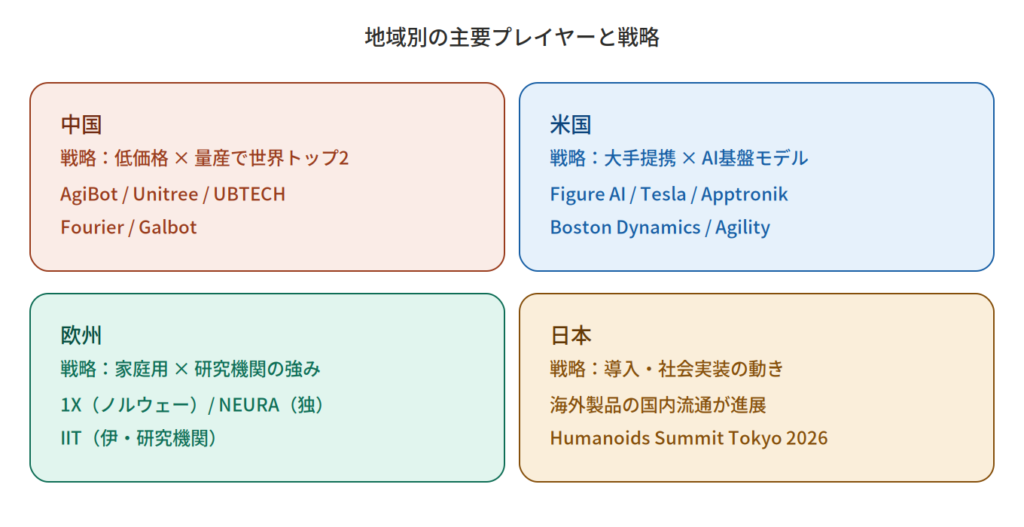
中国|低価格×量産で市場を牽引
中国勢の特徴は、サプライチェーンの厚みを背景にした低価格化と量産展開の速さです。
- Unitree(宇樹科技): G1を16,000ドル~とする低価格戦略で知られています。報道によると、同社の2025年売上高は16.99億元に達し、2023年の1.59億元から大きく成長しました。また、2025年には約5,500台のヒューマノイドロボットを出荷したとされ、研究機関・教育機関・企業PoC向けのプラットフォームとして存在感を高めています。(出典: TechTimes)。また、海外のロボット購入ガイドでは、Unitree G1がリアルタイムの関節状態ストリーミングやVRコントローラー等による操作入力に対応し、テレオペレーションによるデータ収集用途でコストパフォーマンスが高いプラットフォームと評価されています(出典: SVRC「Humanoid Robot Buyer’s Guide 2026」)。
- AgiBot(智元機器人): 2026年3月に累計生産1万台を達成。物流・小売・産業など多分野への導入を進めるほか、ICRA 2026で「AGIBOT World Challenge」を主催するなど研究コミュニティでの存在感も高めています(出典: TechTimes / renue)。
- 2026年の春節期には、中国中央テレビ(CCTV)の国民的番組「春節聯歓晩会(春晩)」で、Unitree Robotics、Galbot、Noetix、MagicLabの4社がヒューマノイドロボットを披露し、報道やSNSでも大きな話題となりました(出典: 吉川真人氏 note)。
- モーションキャプチャー活用の面でも中国は先行しており、前述のTi5 Roboticsの開発効率化事例や、上海のヒューマノイド企業がXsensを用いて人間の動作からロボットに学習させている事例が公開されています(出典: Xsens導入事例: Shanghai Humanoid Robots)。
米国|自動車メーカー提携とAI基盤モデルで商業化を推進
米国勢は出荷台数こそ中国勢に及ばないものの、大手企業との提携による実環境データの獲得とAIソフトウェアの深さで勝負しています。
- 主要自動車メーカーとの提携構図として、BMWはFigure、MercedesはApptronik、HyundaiはBoston Dynamics、ToyotaはAgility Roboticsをそれぞれ支援・採用しており、実工場でのデータ収集体制を築いています(出典: New Market Pitch)。
- Figure AI: 2025年9月のシリーズCで評価額390億ドルに達し、自社開発のVLAモデル「Helix」によるオンデバイス学習を進めています(出典: Robozaps / RobotLAB)。
- Apptronik: NASAのValkyrieプロジェクトの知見をベースとした「Apollo」をMercedes-Benzの自動車サプライチェーンの実証に投入しています(出典: Loona Blog)。
- Boston Dynamics: 電動版Atlasを開発中で、CES 2026ではCNETのBest of CESを受賞。Hyundai傘下で電動版Atlasの実用化を進めています(出典: RobotToday)。なお、XsensはBoston Dynamicsのトレーニングパイプラインでの自社技術活用を公式サイトで紹介しています(出典: Xsens)。
- Tesla: 自社のFSD(自動運転)技術基盤を転用したOptimusを垂直統合で開発しています(出典: New Market Pitch)。
欧州|家庭用ヒューマノイドと研究機関の強み
- 1X Technologies(ノルウェー発): OpenAIなどから出資を受けたことで知られる同社は2025年10月、家庭用ヒューマノイド「NEO」の予約受付を開始しました。価格は2万ドル(または月額499ドルのサブスクリプション)で2026年出荷予定。当初は主に人間の遠隔操作(テレオペレーション)で家事を支援しながら学習する方式を採用している点が特徴で、「テレオペ→データ収集→自律化」というフィジカルAI開発の典型的な流れを体現しています(出典: FabScene / 森山和道氏 note)。
- NEURA Robotics(ドイツ): CES 2026でヒューマノイド「4NE-1」シリーズの先行予約を開始。小型モデル「4NE-1 Mini」(身長132cm・重量36kg・25自由度)を研究・教育用途に投入し、「欧州随一のヒューマノイドメーカー」の地位を目指しています(出典: RoboHorizon)。
- イタリア技術研究所(IIT): 前述の通り、Xsensを活用した人間とロボットの協調研究の事例が公開されており、欧州の研究機関がモーションキャプチャーを安全性・協調性の検証に用いる代表例です(出典: Xsens導入事例)。
日本|社会実装・流通の動きが活発化
日本国内でも、ヒューマノイドロボットの導入・流通の動きが進んでいます。Unitree製品は国内代理店を通じて購入可能になっており(出典: ヒューマノイドジョブ)、イベント・プロモーション、教育、研究、PoC用途での活用が広がりつつあります(出典: ロボスタ)。
また、2026年5月には東京・高輪で「Humanoids Summit Tokyo 2026」が開催され、Unitreeをはじめとする国内外のロボティクス企業・研究者が登壇するなど、社会実装に向けた関心が高まっています(出典: Humanoids Summit Tokyo 2026 公式サイト)。
こうした動きは、国家戦略としても後押しされつつあります。日本経済新聞の報道によると、日本政府は成長戦略の重点「戦略17分野」の官民投資の全容を2026年6月19日に明らかにし、AIでロボットなどを自律的に動かす「フィジカルAI」に対して、官民で2040年度までに10.5兆円を投資する方針を示しました。国費を呼び水として民間投資を促す狙いがあり、フィジカルAIが国家的な重点領域に位置づけられたことを意味します(出典: 日本経済新聞「戦略17分野、フィジカルAIに10.5兆円 官民投資の全容が判明」)
フィジカルAIへの大規模投資が現実のものとなる中、その開発を支える「現実世界の動作データ」の取得基盤の重要性も増しています。国内のロボティクス研究・開発において、実機学習用の動作データ取得やテレオペレーション環境の構築ニーズは今後拡大が見込まれ、慣性式モーションキャプチャーはその中核的なツールとして有力な候補の1つです。
各国事例から見える共通点|競争力を決めるのは「データの質と量」
国・企業によって戦略は異なりますが、共通するのは「実世界の動作データをいかに大量かつ高品質に集めるか」が競争力を左右するという点です。テレオペレーションが訓練データ収集の主要手段である現状において(出典: SVRC)、その入力デバイスであるモーションキャプチャーの精度・スループット・運用性は、開発スピードに直結します。
ハンドトラッキング・VRとの組み合わせ

ロボットの「手」による物体操作(マニピュレーション)は、全身動作とは別軸の重要テーマです。Xsensでは、Manus製の「Metagloves」との組み合わせにより、指先を含む手部の動作キャプチャ(センサーサンプルレート120Hz)に対応しており、全身スーツ+グローブで「歩行・全身動作+手指の細かい操作」を一体で取得できます(出典: Xsens)。
また、研究現場ではVRヘッドセット・コントローラーによる操作入力も広く使われており、モーションキャプチャーとVRはタスクの性質(全身動作か、上半身・手元中心か)に応じて使い分け・併用されています(出典: TeleGate論文)。
導入の進め方・活用ステップ
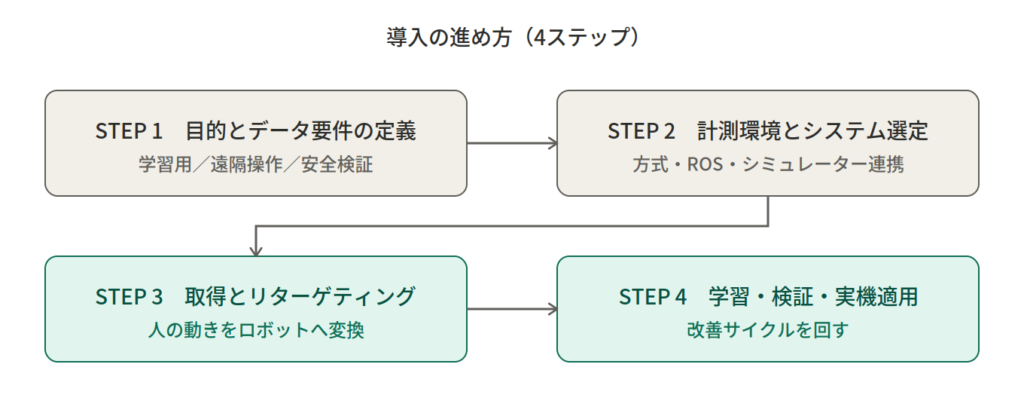
ロボティクス開発でモーションキャプチャーを活用する一般的な流れは次の通りです。
STEP1 目的とデータ要件の定義
模倣学習用データセットの構築か、リアルタイムのテレオペレーションか、安全性検証かによって、必要なデータ形式・遅延・精度要件が変わります。
STEP2 計測環境とシステムの選定
実機ラボ・工場など実環境で取得するなら慣性式が第一候補。シミュレーター(Isaac Sim / MuJoCo)やROSとの接続性も確認します。
STEP3 データ取得とリターゲティング
人間の骨格とロボットの関節構成は異なるため、取得したモーションをロボットの自由度に変換(リターゲティング)するパイプラインを構築します。
STEP4 学習・検証・実機適用
収集データでAIモデルを訓練し、シミュレーションと実機で検証。実機の挙動データをフィードバックして改善サイクルを回します。HELTECでは、Xsensをはじめとするモーションキャプチャーシステムの選定から、データ活用・運用設計までを一貫して支援しています。デモ計測のご相談も可能ですので、お問い合わせください。
モーションキャプチャー導入のご相談
HELTECでは、Xsensをはじめとするモーションキャプチャーシステムの選定から、データ活用・運用設計までを一貫して支援しています。デモ計測のご相談も可能です。
まとめ
- フィジカルAI・ヒューマノイドの開発競争は「量産・商業化」フェーズに入り、実世界の動作データの獲得競争が始まっている。
- テレオペレーションと模倣学習が訓練データ収集の主要手法であり、モーションキャプチャーはその中核インフラ。
- ロボティクス用途では「絶対位置」より「関節角度・リアルタイム性・実環境での運用性」が重視されるため、慣性式(Xsens)が現実的な選択肢となるケースが多い。
- 中国(量産・低価格)、米国(提携×AI基盤モデル)、欧州(家庭用・研究機関)、日本(社会実装)と各国の戦略は異なるが、いずれも実世界データが競争力の源泉。
よくある質問(FAQ)
Q1. シミュレーションで学習できるなら、モーションキャプチャーは不要では?
A1. いいえ。シミュレーションと実環境には摩擦・慣性・接触などの差異(sim-to-realギャップ)があり、現実の人間の動作データはこのギャップを埋めるために重要です。実際、シミュレーション基盤を提供するNVIDIAも、フィジカルAIの構築には物理ベースのシミュレーションと実世界データの組み合わせが必要としています(出典: NVIDIA)。
Q2. ロボティクス用途では光学式と慣性式のどちらが良いですか?
A2. 実機のある開発環境・工場・屋外でのデータ取得やテレオペレーションには、カメラ設置不要でリアルタイム性に優れる慣性式が適しています。ミリ単位の絶対位置精度が必要な研究では光学式が選ばれます。両者は補完関係にあり、目的に応じた使い分けが推奨されます。
Q3. 取得したモーションデータはそのままロボットに使えますか?
A3. 人間とロボットでは骨格・関節構成が異なるため、「リターゲティング」と呼ばれる変換処理が必要です。XsensはBVH等の標準形式でのエクスポートやROS / Isaac Sim / MuJoCo連携に対応しており、ロボット側のパイプラインへの組み込みが可能です(出典: Xsens)。
Q4. 手指の細かい動作も取得できますか?
A4. 可能です。全身スーツに加えて、Manus製Metaglovesなどのデータグローブを併用することで、指先を含むハンドトラッキングに対応できます(出典: Xsens)。
まずは無料デモで、ロボティクス開発における動作データ取得を体感してください
出典・参考文献一覧
- HELTEC「モーションキャプチャーとは?それぞれの方式の比較・仕組み・活用事例【2026年最新版】」
- NVIDIA「フィジカル AI とは?」
- SCSK IT Platform Navigator「フィジカル AI(Physical AI)とは?」
- Xsens「Humanoid Robotics Motion Training」
- Xsens導入事例「Ti5 Robotics」
- Xsens導入事例「Shanghai Humanoid Robots」
- Xsens導入事例「Italian Institute of Technology」
- Xsens導入事例「Beijing Humanoid Half Marathon」
- Labellerr「7 Top Teleoperation Service Providers for Robotics in 2026」
- TeleGate: Whole-Body Humanoid Teleoperation via Gated Expert Selection with Motion Prior(arXiv) https://arxiv.org/pdf/2602.09628
- Bloomberg「Chinese Firms Dominated Global Humanoid Robot Shipments in 2025」
- 新華社「Chinese firms lead global humanoid robot production in 2025: report」
- South China Morning Post「Chinese firms outpace US rivals in 2025 humanoid robot shipments」
- South China Morning Post「China’s Unitree ships more than 5,500 humanoid robots in 2025」
- AGIBOTプレスリリース(PR Newswire)「Omdia Ranks AGIBOT No.1 Worldwide in Humanoid Robot Shipments in 2025」
- The Robot Report「AGIBOT makes its U.S. debut with more than 5,100 robots shipped」
- TechTimes「Unitree IPO Cleared, AGIBOT Hits 10,000 Units」
- renue「中国ヒューマノイド軍団 ― Unitree・AgiBot・UBTECH・Galbotが世界を席巻する理由【2026年版】」
- 吉川真人氏 note「2026年春晩にヒューマノイドロボット4社が”集団出演”」
- SVRC「Humanoid Robot Buyer’s Guide 2026」
- New Market Pitch「Figure 03 vs Tesla Optimus Comparison Tracker (2026)」
- Robozaps「30+ Humanoid Robot Companies Ranked [2026]」
- RobotLAB「Humanoid Robots for Business: 2026 Guide」
- Loona Blog「Top 20 Humanoid Robot Companies to Watch in 2026」
- RobotToday「Boston Dynamics IPO and $100B Valuation」
- FabScene「OpenAI出資の1Xが2万ドルで「NEO」予約開始」
- 森山和道氏 note「1X Technologies、家庭用ヒューマノイド「NEO」を予約受付開始」
- RoboHorizon「NEURA Robotics、ポルシェデザインのヒューマノイドの予約受付開始」
- ヒューマノイドジョブ「中国のヒューマノイドロボット企業15社完全ガイド」
- ロボスタ「ヒューマノイド「Unitree G1」活用でイベント・プロモーション領域に参入」